Humanoid Robot Simulation, Perception, and Control
Designed and implemented bipedal locomotion control for the G1 humanoid robot using PPO-based reinforcement learning in Isaac Gym and MuJoCo, achieving stable walking in simulation and Sim2Real deployment.
Built a complete SLAM and navigation pipeline in ROS and Gazebo: Lidar-based mapping (Fast-LIO2, NDT, GICP), localization, global path planning (A*), local obstacle avoidance (DWA), and autonomous exploration (TarePlanner, FarPlanner).
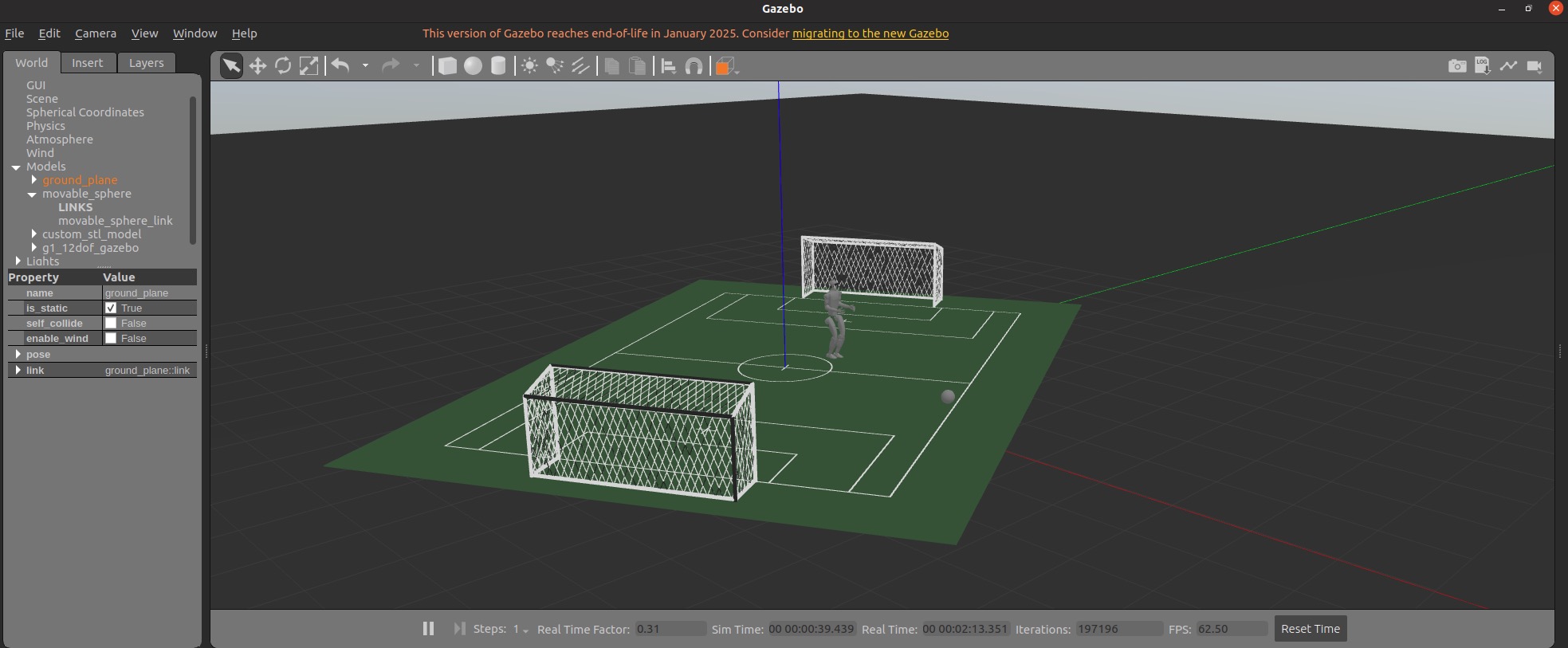
Developed YOLOv11-based object detection for RoboCup simulation, recognizing football, goalposts, and field markings; integrated with visual-space localization and EKF sensor fusion for autonomous kicking tasks.
Created a voice-interactive navigation system leveraging large language models (LLMs) and NaVid for indoor semantic navigation.
Tools & Skills: ROS, Gazebo, Isaac Gym, MuJoCo, Python, PyTorch, YOLOv11, SLAM, path planning, reinforcement learning, sensor fusion, Sim2Real.