WORK EXPERIENCE
At BMW Group, I research and analyze AI, robotics, and startup trends to support BMW R&D innovation strategy. I track U.S. venture activity and engage with startups, VCs, and academic partners in emerging tech ecosystems.
My technical contributions include designing and fabricating custom PCBs for a modular biosensing platform, integrating heart rate, EDA, and eye-tracking modules for in-vehicle driver state monitoring. I've integrated webcam-based eye tracking with embedded machine learning models (OpenCV, TensorFlow Lite) for real-time pupil detection and attention monitoring.
Additionally, I calibrate and validate stress detection algorithms using fused biosensor data in real driving scenarios, enabling robust physiological state estimation. I develop embedded software (C++/Arduino) and Python-based data pipelines for synchronized multimodal data acquisition across IMUs, optical sensors, and physiological sensors (GSR).
At Novelis, I specialize in the mechanical design of aluminum battery pack housings for electric vehicles (EVs), optimizing their structural integrity and thermal management to enhance energy efficiency and reduce weight. I lead benchmarking efforts on EV battery packs and conduct Finite Element Analysis (FEA) to assess performance under various operational conditions, such as impact resistance, thermal performance, and vibration tolerance. Additionally, I perform material testing to compare the properties of aluminum against steel, focusing on mechanical strength, corrosion resistance, and thermal conductivity to highlight aluminum's advantages for EV applications.
In my role, I also perform in-depth analysis of materials such as metals, plastics, surface coatings, and finishes to optimize their performance in electric vehicles (EVs) and trucks. I lead material benchmarking and selection processes, focusing on enhancing durability, reducing weight, and improving energy efficiency through the use of advanced coatings and metals. My responsibilities include evaluating battery cell performance and degradation in relation to material choices, using tools like Python (FastSim) and Excel to visualize and analyze data correlations. I collaborate with cross-functional teams to assess how material and cell choices affect manufacturing processes and product quality, ensuring all components meet industry standards for energy storage and longevity.
During my time at Bosch, I designed precision mechanical components, including impellers and housings for EV cooling systems, with a focus on meeting strict performance standards for tolerances and vibration control. I conducted extensive Finite Element Analysis (FEA) to evaluate stress distribution, thermal performance, and identify potential failure points in the components. In addition, I led prototype testing under various conditions to ensure the reliability and durability of the designs.
RESEARCH AND PROJECTS
In my role as a Teaching Assistant for ME 211, I supported over 100 students by holding weekly office hours to assist with homework questions and provide in-depth explanations of key concepts in material science, such as atomic structure, crystallography, and material properties. I collaborated with the professor to facilitate in-class discussions, leading problem-solving sessions and interactive exercises. Additionally, I organized and conducted review sessions before exams, developing practice problems to help students understand complex topics. My responsibilities also included grading assignments and exams, ensuring consistency and providing constructive feedback.
As a member of Team 4 in the Collaborative Robotics project at Stanford University, I contributed to the development of a robotic system capable of autonomous navigation, perception, and manipulation. Our team successfully implemented a state-based approach for block pattern replication tasks using the LoCoBot platform.
Key contributions and achievements:
- Implemented navigation and perception algorithms using ROS2, enabling the robot to autonomously locate target blocks.
- Developed a camera tilting mechanism to improve block detection accuracy.
- Designed and implemented perception algorithms for precise color-based block identification.
- Programmed manipulation algorithms using the MoveIt framework for accurate block grasping and placement.
- Integrated odometry feedback with PI control to enhance navigation accuracy.
- Collaborated on the development of a state-based system architecture, dividing the task into six distinct states for efficient execution.
- Conducted extensive testing and debugging to ensure reliable performance in competition scenarios.
This project enhanced my skills in robotics software development, computer vision, and collaborative problem-solving in a team environment. It also provided valuable experience in integrating various robotic subsystems to achieve complex autonomous behaviors.
Video: Collaborative Robotics Project Demonstration
During this research experience, I worked with Prof. Nick Hawes and his research group on the Multi-Agent Travelling Salesman Problem (mTSP). My work involved comparing the Monte Carlo Algorithm with the Simulated Annealing Algorithm (SAA) to evaluate their effectiveness in solving the mTSP. I improved the penalty function in the SAA, which resulted in a more efficient solution, bringing it closer to the theoretical optimal path. This research contributed to advancements in optimizing route planning for multi-agent systems, with potential applications in fields such as robotics and logistics.
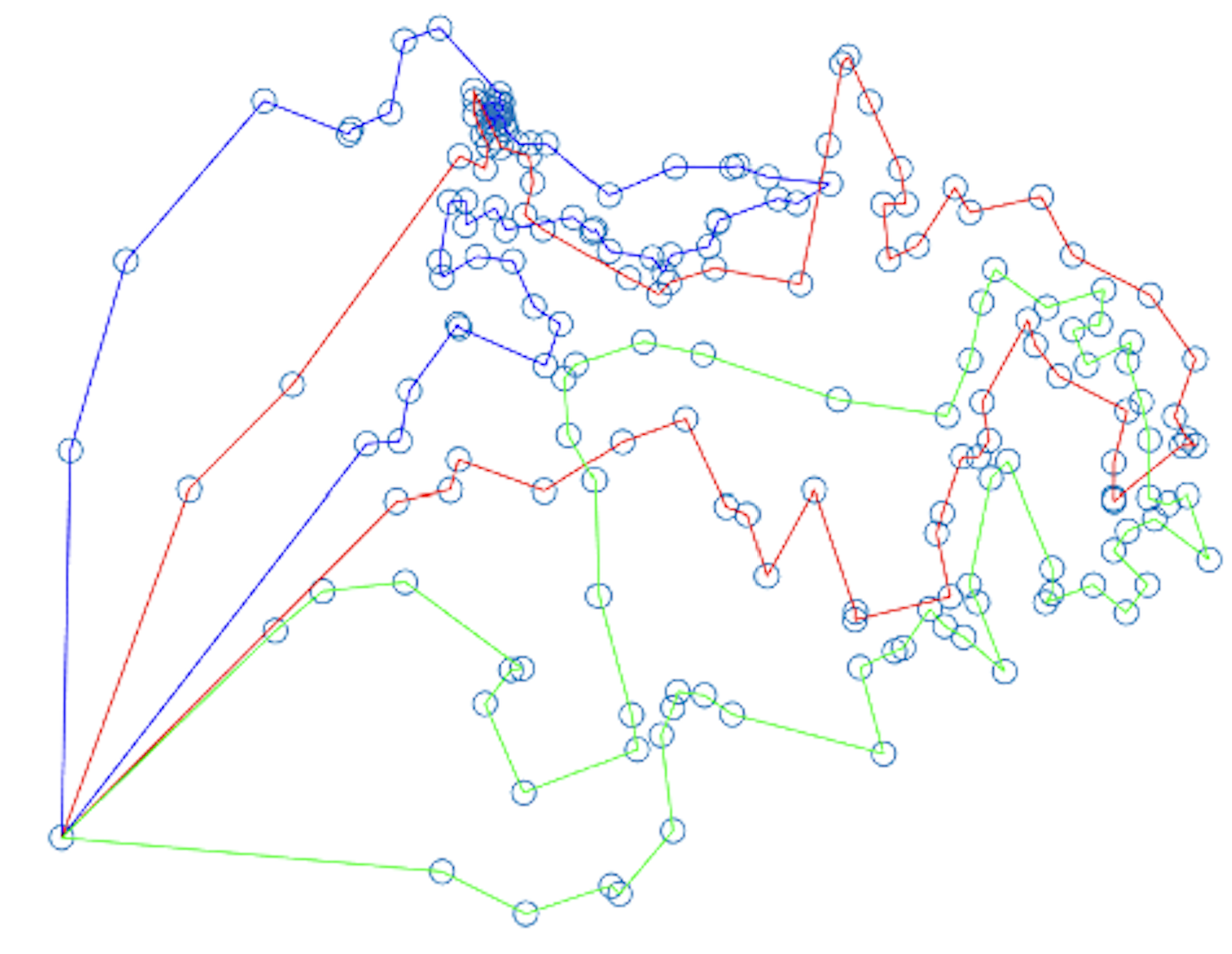
Before improvement
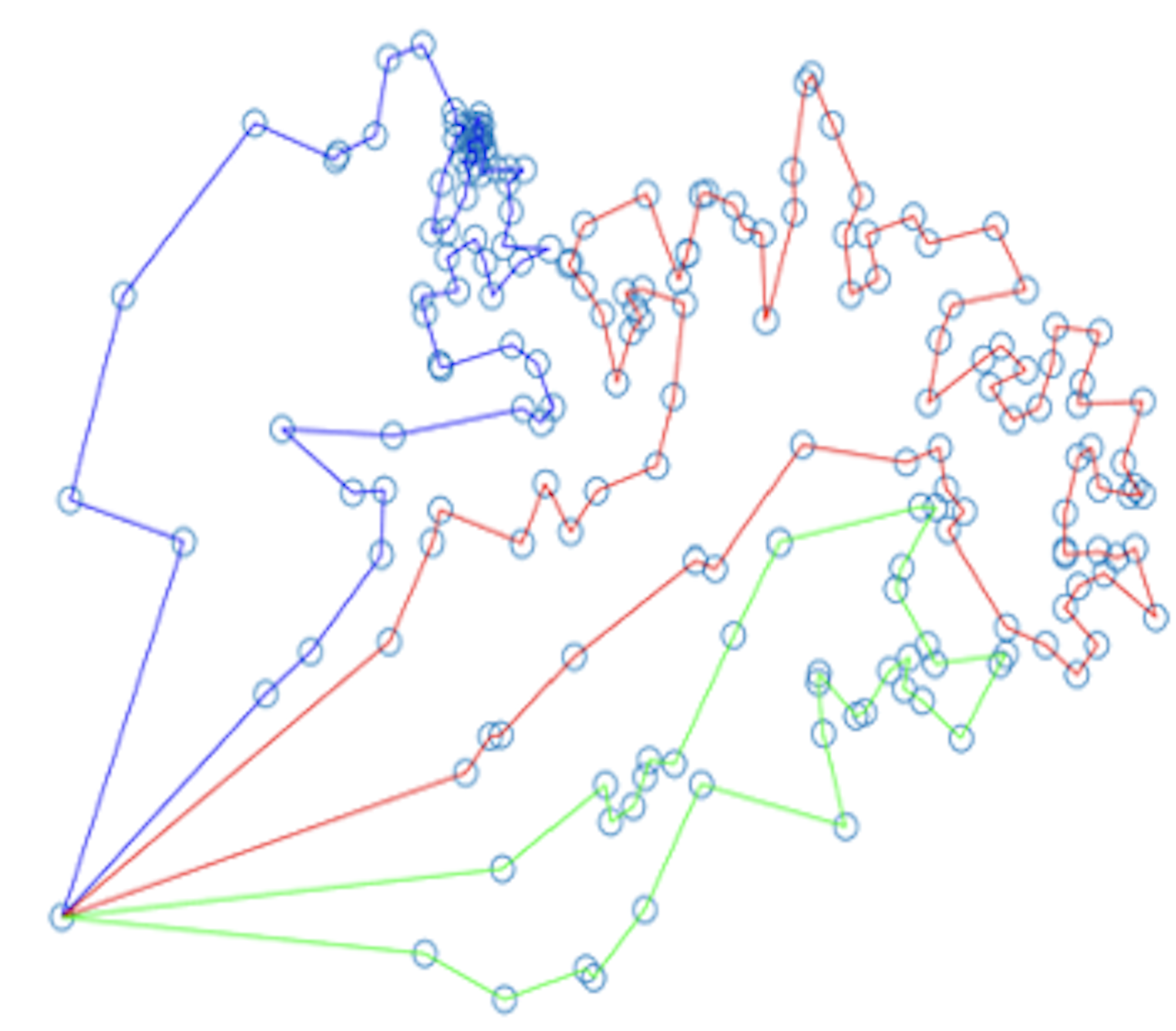
After improvement